Artificial Vision Helps Identify Plants in Diverse Habitats
Greg Howard
7th September, 2025



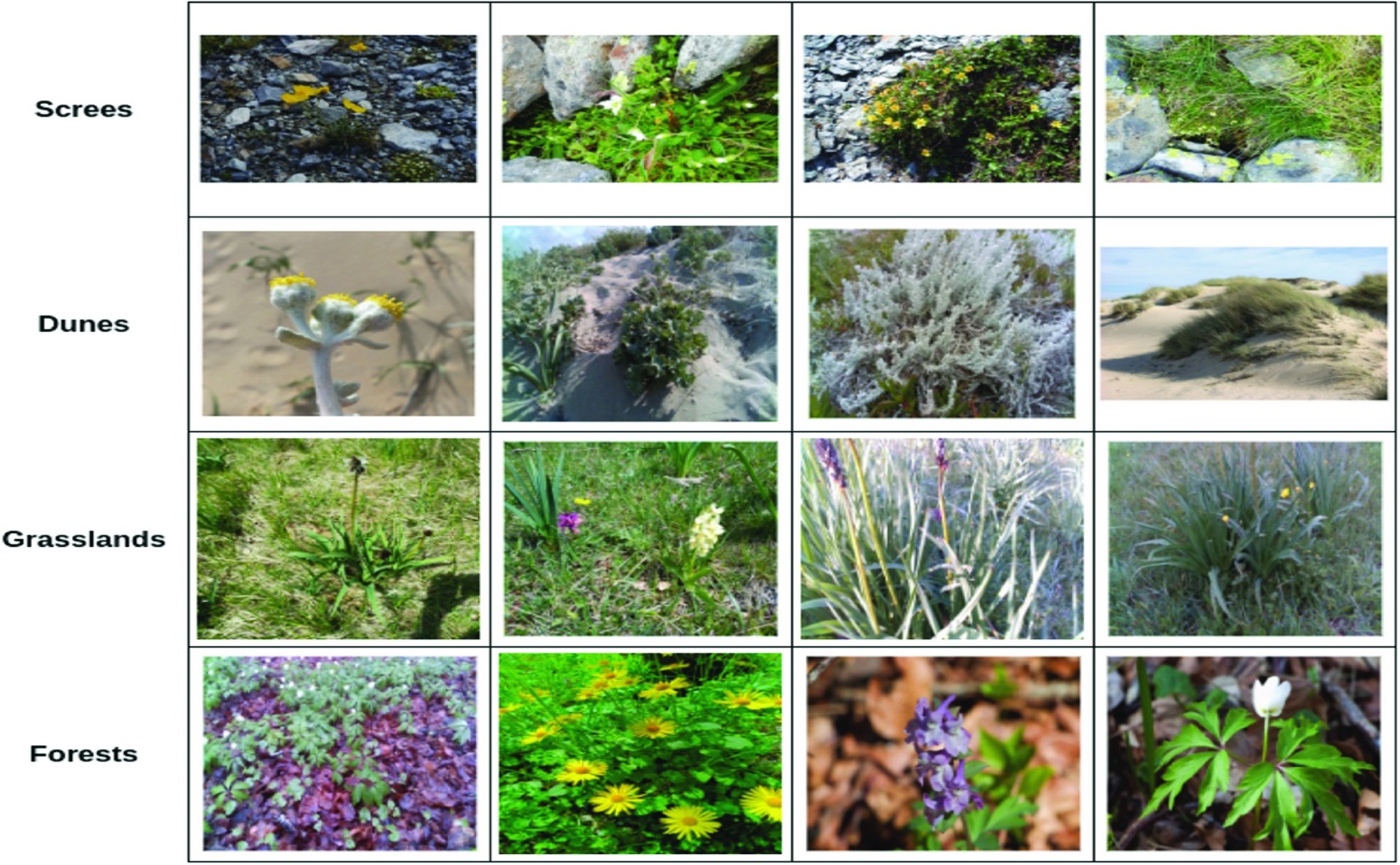
Sample images from each of the four habitats. Only a few of the species considered are displayed in this figure for brevity.
Key Findings
- Researchers tested six AI models on plant species identification across screes, dunes, grasslands, and forests to automate habitat monitoring
- YOLOv8 consistently outperformed other models in accurately identifying plants, even with variations in habitat and data collection methods
- While YOLOv8 showed the best overall performance, other models sometimes detected plants missed during manual annotation, highlighting potential benefits beyond strict accuracy scores
References
Main Study
1) Artificial vision models for the identification of Mediterranean flora: An analysis in four ecosystems
Published 5th September, 2025
https://doi.org/10.1371/journal.pone.0327969
Related Studies
2) Robotic monitoring of Alpine screes: a dataset from the EU Natura2000 habitat 8110 in the Italian Alps.
3) An Approach for Plant Leaf Image Segmentation Based on YOLOV8 and the Improved DEEPLABV3.
4) Vegetable disease detection using an improved YOLOv8 algorithm in the greenhouse plant environment.
Related Articles
 7th April, 2024 | Jim Crocker
7th April, 2024 | Jim Crocker